2020年6月26日,(株)スズキ自販湘南様から研究で使用するセニアカーが納品されました.高齢者が乗るセニアカーは,歩行者と変わらない移動速度ですが事故も多く発生しており,当研究室ではセニアカーの自動運転にチャレンジします.
公益財団法人スズキ財団から受託している研究課題で使用します.本研究ではセニアカーを改造して使用するため,公道では走行不可となる予定です.

2020年6月26日,(株)スズキ自販湘南様から研究で使用するセニアカーが納品されました.高齢者が乗るセニアカーは,歩行者と変わらない移動速度ですが事故も多く発生しており,当研究室ではセニアカーの自動運転にチャレンジします.
公益財団法人スズキ財団から受託している研究課題で使用します.本研究ではセニアカーを改造して使用するため,公道では走行不可となる予定です.


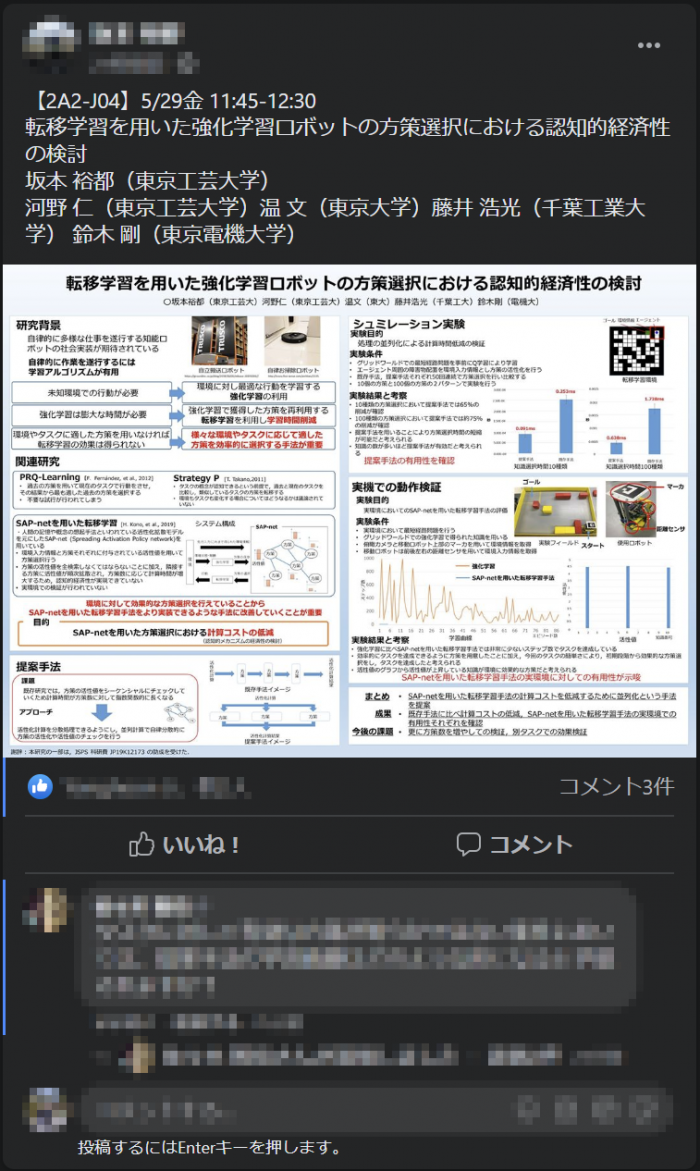
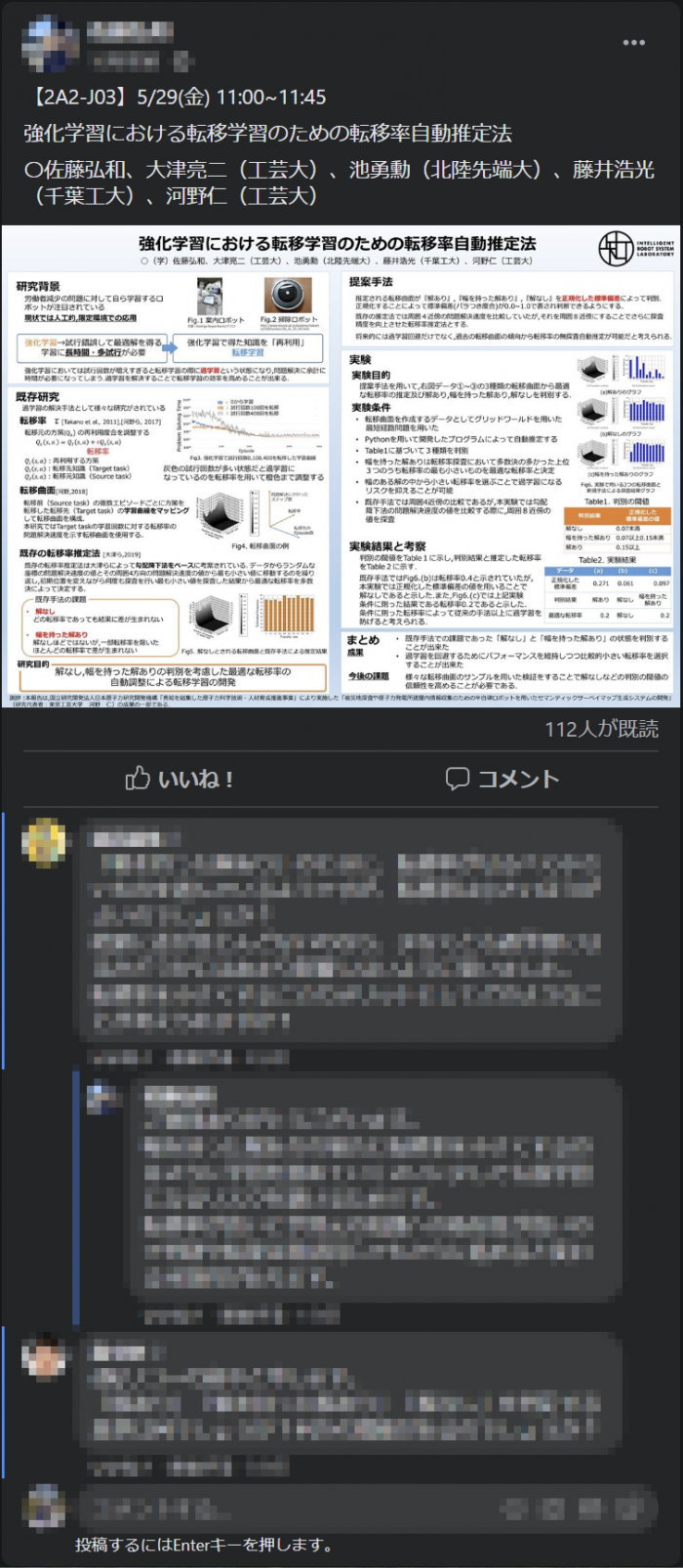
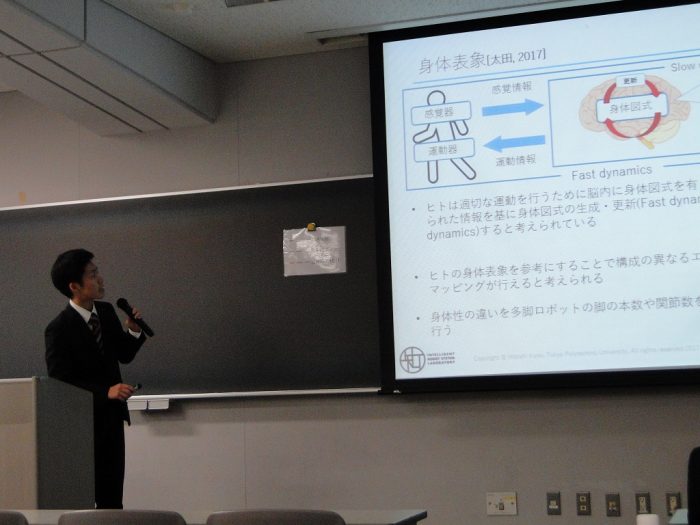
2020年5月29日,本来ならば金沢で開催されるはずだったロボティクス・メカトロニクス講演会2020がWEBで開催され,当研究室からはM1の佐藤君と坂本君が参加しました!
学会にWEBで発表するのは全員経験がなく,どうなるか心配でしたが無事ポスター発表でき,質問もあり大変有意義な発表となりました!
2020年4月1日,研究室に石原太聞 君,小林慎司 君,樋口直哉 君の4年生3名と,坂本裕都 君,佐藤弘和 君の本学大学院修士課程1年生2名が配属されました!新型コロナの影響で大変な年ですが,研究を一緒に頑張りましょう!
河野仁, 平成29年度研究報告書概要 学習ロボットにおける知識の再利用度合いオートチューニング法の開発, スズキ財団2019年度年次報告書, 公益財団法人スズキ財団, pp.38-39, Mar. 2020.
2020年3月23日東京工芸大学厚木キャンパスにて工学部・工学研究科の学位授与式が執り行われ,当研究室からは5名が学士(工学)の学位を授与されました.おめでとうございます!
今年の卒業生は2名が大学院進学,3名が就職です.頑張った大学生活の経験を生かして,社会でも活躍してください!

2020年1月,日本原子力研究開発機構が発行しているJAEA-Reviewに河野らの研究プロジェクト 平成30 年度 英知を結集した原子力科学技術・人材育成推進事業「被災地探査や原子力発電所建屋内情報収集のための半自律ロボットを用いたセマンティックサーベイマップ生成システムの開発」の成果報告書が掲載されました.
詳細は業績リストをご覧ください.
2020年3月15日から16日までに北海道函館で開催される予定だった,第25回ロボティクスシンポジアが新型コロナウイルスの影響で中止となり,WEB開催でパソコン上で参加しました!
共同研究先の中央大学片岡さんの発表も堂々としたもので,初のWEB開催ながらも大変有意義な発表となったと思います!

2020年2月7日,電子機械学科の卒業研究発表会が行われました.当研究室からは卒研生の5名全員が無事発表でき,練習通りの良い発表でした!
これにて卒業研究としては一段落ですが,卒論の最終提出に向けて引き続ぎ頑張りましょう!




2020年1月19~20日,日本原子力研究開発機構の楢葉遠隔技術開発センターにてレスキューロボットシステムの評価実験を実施しました!夏に引き続き,今年度2回目です.
千葉工大と中央大の成果を工芸大のレスキューロボットに搭載し,部分的に統合実験を実施し,大変有意義な実験となしました!



2020年1月13日~16日まで開催された 2020 IEEE/SICE International Symposium on System Integration (SII2020)に助教の河野が参加してきました.河野はSII2020のSpecial sessionのRobot behavior control and environmental sensingのPrincipal organizerで,当日はSession chairを務めてきました!
当セッションにてご発表いただいた東京大学のルイ笠原 純ユネス博士がSII2020のBest paper awardを受賞し,セッションを立ち上げた甲斐がありました!おめでとうございます!