
計算機クラスタ CLARIS ver.0.3
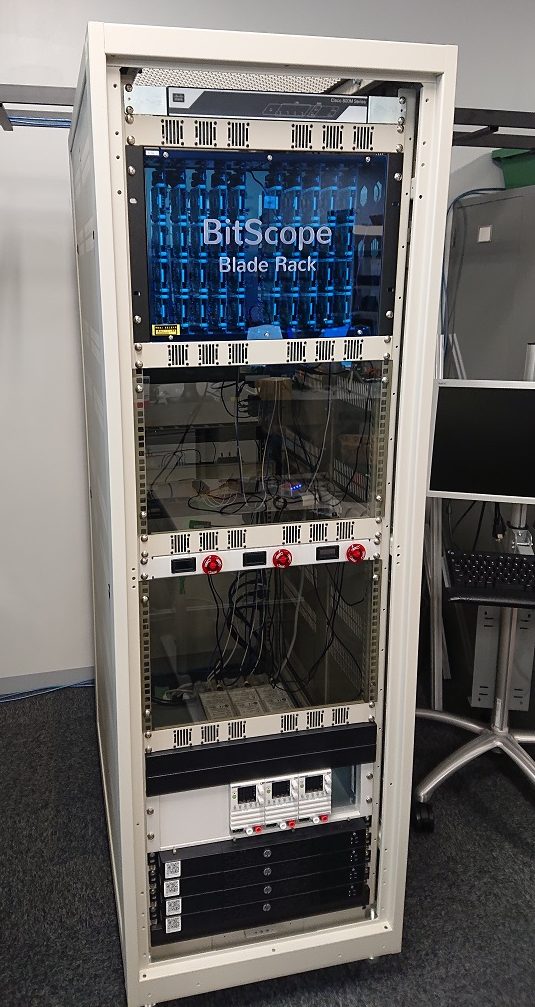
CLARIS (Cluster computing for adaptive robotic systems)は,認知心理学の活性化拡散モデルをロボットの知能化技術として検証・実装するためのPCクラスタです.概念モデルの動作を大規模同時並列的に計算する検証用コンピュータシステムです.BitScope Blade Rack 40 を使用してRaspberry Pi 3 B+を40機搭載,自作のクラスタ筐体にはRaspberry Pi 4を40機搭載しています.合計で320コアを提供します.
研究統合技術ネットワーク基盤 TeNeBRIs

TeNeBRIs (Technological network base for research integrations)は,富士通製のサーバPRIMERGY RX300などを複数台搭載し,主に物理演算ライブラリを導入した強化学習シミュレーションのために構築されました.マルチコアかつマルチCPU,大容量メモリ環境を提供するサーバシステムです.さらには機械学習計算,データ管理,CADによる設計など研究室における様々な研究作業を支援するプラットフォームです.
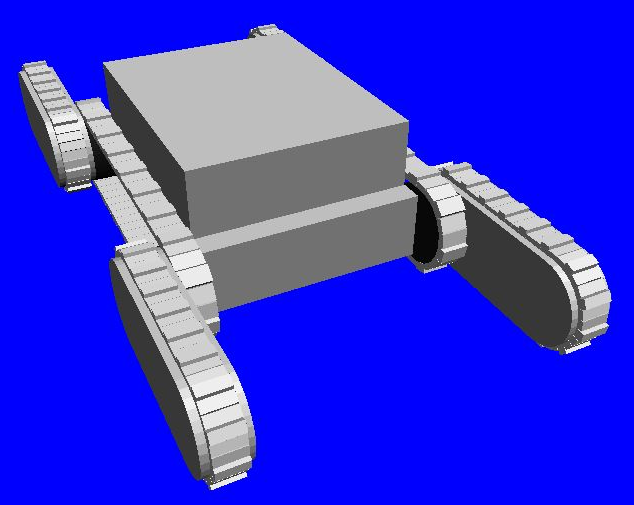
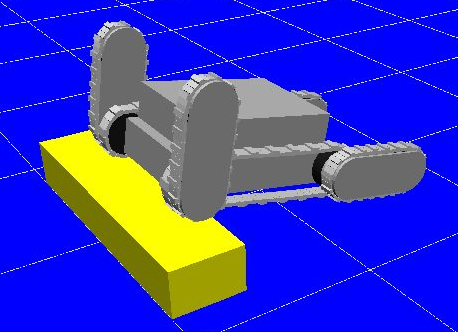
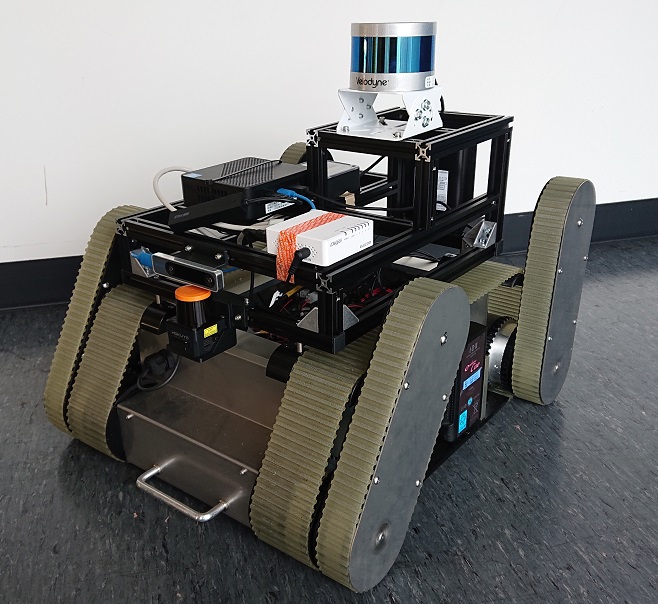
レスキューロボット Mk-9

本ロボットは日本原子力研究開発機構 英知を結集した原子力科学技術・人材育成推進事業 の研究プロジェクトにて開発した遠隔操作型クローラロボットです.
Mk-9はChoreonoidの動力学シミュレーションのためのモデル(仮想Mk-9)も当研究室で作成されており,強化学習プログラムなどを実装することで,学習結果を実Mk-9に転移可能です.物理演算ライブラリにはAlgoryxのAGX Dynamicsを使用しています.

2022年度以前の所有機器
研究基盤計算機システム RIMCS(2023年4月1日からTeNeBRIsとしてPRISERと統合)

RIMCS (Research infrastructure by multiple computers)は,強化学習や転移学習,物理演算シミュレーション,CADによる設計など研究室における様々な研究作業を支援するプラットフォームで,研究室の情報化支援技術がここに搭載されています. メインルータやWEBサーバ,ストレージ,シミュレーション用の富士通製PRIMERGYサーバを複数台搭載しています.
シミュレーションサーバ群 PRISER(2023年4月1日からTeNeBRIsとしてRIMCSと統合)
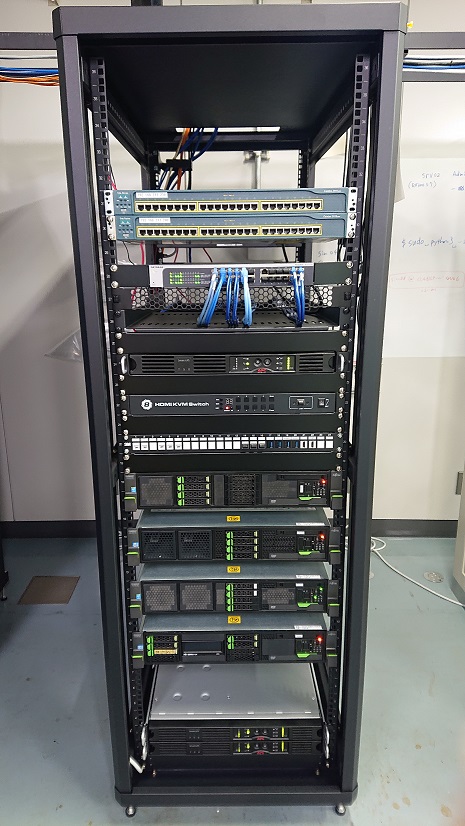
PRISER ( PRIMERGYs for simulation research)は,富士通製のサーバPRIMERGY RX300などを複数台搭載し,主に物理演算ライブラリを導入した強化学習シミュレーションのために構築されました.マルチコアかつマルチCPU,大容量メモリ環境を提供するサーバシステムです.
セニアカーET4D
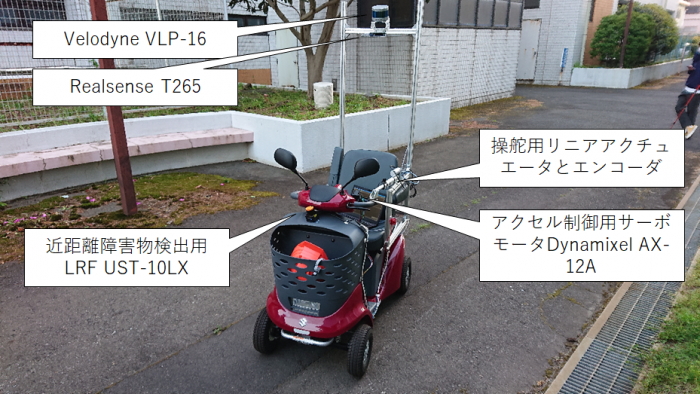
高齢者の移動手段として普及しているセニアカーですが事故も多く発生しており,スズキから購入して自動運転できるように改造しました.カタログスペック(無改造時)は以下のとおりです.
- 最大積載量 100 kg
- 連続走行距離 31 km
- 最小回転半径 1.45 m
- 最高速度 6 km/h
- 寸法 1,195×650×1,145 m
フォークリフト型ロボット
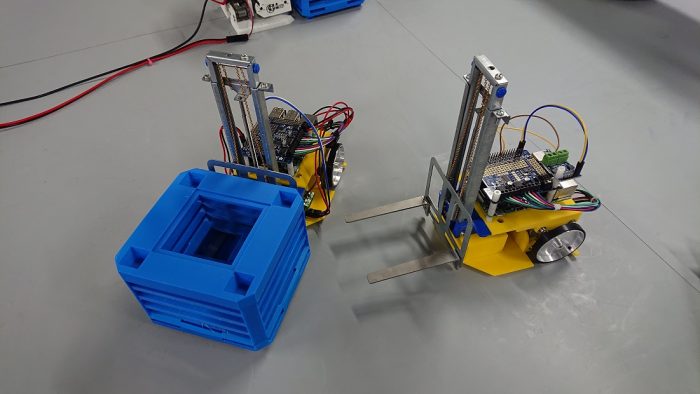
当研究室の強化学習・転移学習評価用として開発された移動ロボットです.コンテナの搬送作業も可能で,タミヤのフォークリフト工作セットやRaspberry Piを用いて開発しました.
KU-MO (IRSLXR06-01)
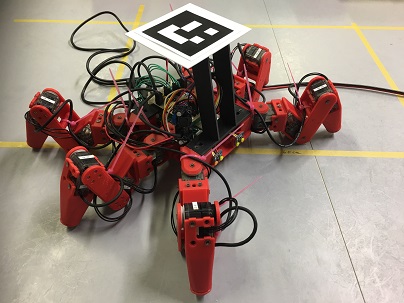
KUMOは18自由度で足先には触覚センサが搭載されている多脚型移動ロボットです.Rasberry Piにより制御され,モータには DYNAMIXELのXL-320を使用しています.
小型実験用レスキューロボット TOKOROBO
Raspberry Piやタミヤの工作キットなどを用いて,学生が卒業研究で開発した小型の教育向け実験用レスキューロボットです.wifi経由でゲームパッドを用いて遠隔操作が可能である.ロボットに搭載されたカメラ映像も操作者PC上に表示が可能で,本物のレスキューロボットの機能をそのままに,小型化・低コスト化を図りました.
Raspberry Pi Mouse V2

アールティ製のラズパイマウスにカメラとIMUを搭載したロボットです.Raspberry Piが搭載され,ROS (Robot operating system)により制御可能です.