当研究室では,知能化技術とロボットを融合させ,身体性があるからこそ可能となる知能化システムの実社会への実装・貢献を目指して研究しています.大きく分けて2つのテーマで研究活動しており,強化学習における転移学習の応用研究やレスキューロボットの知能化等の研究を行っております.
認知心理学の知見を応用した知識選択型転移強化学習の研究
本研究では,あるタスクに対して1つの方策しか獲得できないこれまでの強化学習と,方策を再利用することで新たな環境での学習を加速できるが再利用方策はヒトが明示的に与える必要のある転移学習の課題を解決するために,認知地心理学の知見を活用し,効果的な方策の選択メカニズムを研究しています.
| 研究種別 | 筑波大学,北陸先端科学技術大学院大学との共同研究 |
| 関連予算 |
|

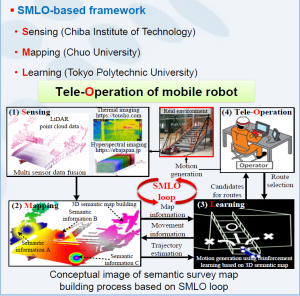
知能化された災害対応ロボットによるセマンティックサーベイマップ生成システム
In this research, we propose a semi-autonomous mobile robot system that builds a wide area survey map including semantic information to carry out damage monitoring in disaster area such as Fukushima Daiichi nuclear power plant station. To this end, following technologies are developed and SMLO loop-based seamless integration is realized as shown in figure.
- A sensor system that measure heat source, radiation source, water source, other substance information as well as color and shape information in the environment.
- SLAM (simultaneous localization and mapping) scheme that generates precise a wide area semantic survey map for learning-based motion generation of the mobile robot.
- A route generation system that perform reinforcement learning based on the built map from the SLAM scheme.
An operator is able to control the robot semi-automatically based on the generated route. The generated semantic survey map can be used for prevention of secondary disasters and recovery plans given that it contains useful information for the disaster environment.
| 研究種別 | 中央大学,千葉工業大学,北陸先端科学技術大学院大学との共同研究(プロジェクト実施時の組織体制) |
| 関連予算 | 日本原子力研究開発機構: 平成30年度 英知を結集した原子力科学技術・人材育成推進事業(若手研究), 被災地探査や原子力発電所建屋内情報収集のための半自律ロボットを用いたセマンティックサーベイマップ生成システムの開発, 研究期間: 2018年9月-2021年3月(2021年9月まで延長) |
終了した研究テーマ
自己身体表象を基にした異なる身体性を有するロボット間での転移強化学習
本研究では,身体性の異なる(しかし類似した)エージェント間での転移学習において,これまでInter-task mappingという身体性の差異の関係をヒトの経験と直感で設定されていた手法に対し,ヒトの脳内身体表現とその変容を参考にロボット版身体図式の記述法を確立し,Inter-task mappingの自動化を目指す研究です.ロボットの身体図式を生成するためにBody calibration手法を提案し実ロボット間での転移強化学習で効果を検証しています.
| 研究種別 | 単独研究 |
| 関連予算 | 日本学術振興会: 科学研究費補助金(若手研究), 課題番号: 18K18133,自己身体表象を基にした異なる身体性を有する学習ロボット間での転移学習, 研究期間: 2018年4月-2021年3月 |
知識の再利用度合いオートチューニング手法の開発
| 研究種別 | 単独研究 |
| 関連予算 | 公益財団法人 スズキ財団: 平成29年度科学技術研究助成, 学習ロボットにおける知識の再利用度合いオートチューニング手法の開発, 研究期間: 2018年4月-2019年3月 |
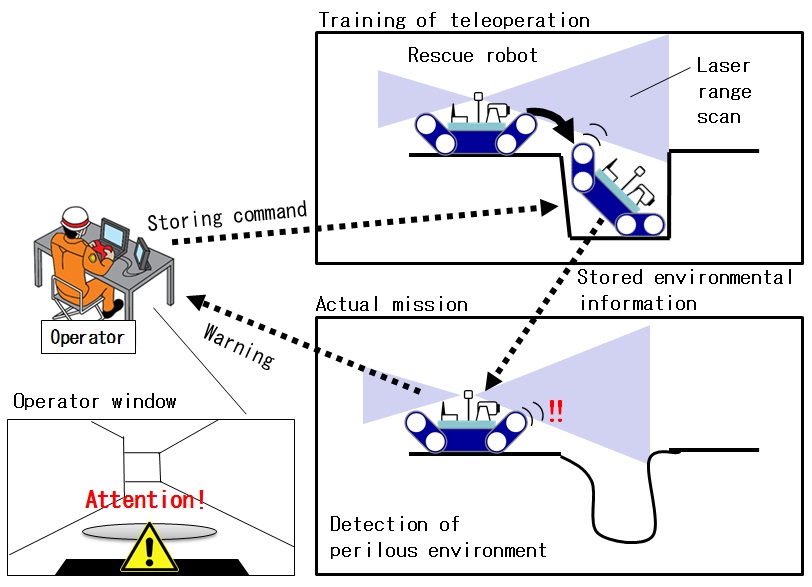
災害対応ロボットの遠隔操作支援システムの開発
本研究では,知能化技術を活用し難しい災害対応ロボット(クローラタイプ)の遠隔操作支援システムを研究・開発しています.あらかじめ訓練時等でロボットが危険な環境を学習・記録しておき,本番・実践環境で類似環境を検出した場合は,オペレータに注意喚起を促すシステムです.
| 研究種別 | 東京電機大学,富山県立大学との共同研究 |
| 関連予算 | 日本学術振興会: 科学研究費補助金(研究活動スタート支援), 課題番号: 15H06102,訓練事例を用いたレスキューロボット遠隔操作支援システムの開発, 研究期間: 2015年9月-2017年3月 |
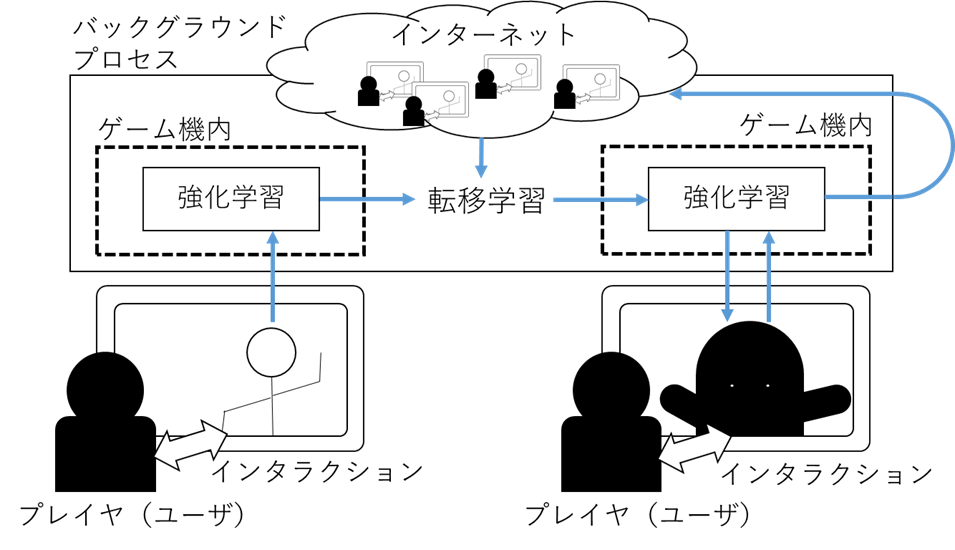
インテリジェントなゲーム内NPCのための転移学習
本研究では,ゲーム内のノンプレイヤキャラクタ(Non-player charactor: NPC)に強化学習による学習機能と転移学習による知識の再利用機能を付与することで,ゲームタイトルを超えて持続的に成長するインテリジェントNPCの開発を目的としています.
| 研究種別 | 単独研究 |
| 関連予算 | 公益財団法人 中山隼雄科学技術文化財団: 研究助成事業(平成28年度研究助成A-1), 成長するノンプレイヤキャラクタの知能とその転移, 研究期間: 2017年4月-2019年3月 |